

110mm 閉ループモーター 220V 20Nm ビッグトルクステッピングモーター LED ディスプレイ付き
NEMA42イージーサーボシリーズ(NEMA42クローズドループシリーズ)
モーターの電気的パラメータ:
| モード | ステップ角 | 電流(A) | 抵抗(Ω±10%) | インダクタンス (mH±20%) | 保持トルク(N・m) | モーター長さ(mm) | エンコーダ 解像度(PPR) | 対応ドライバー |
| 110HCE12N-B39 | 1.2° | 4.2 | 1.2 | 13 | 12 | 139 | 1000 | 3HSS2260 |
| 110HCE20N-B39 | 1.2° | 4.2 | 1.88 | 18 | 20 | 221 | 1000 | 3HSS2260 |
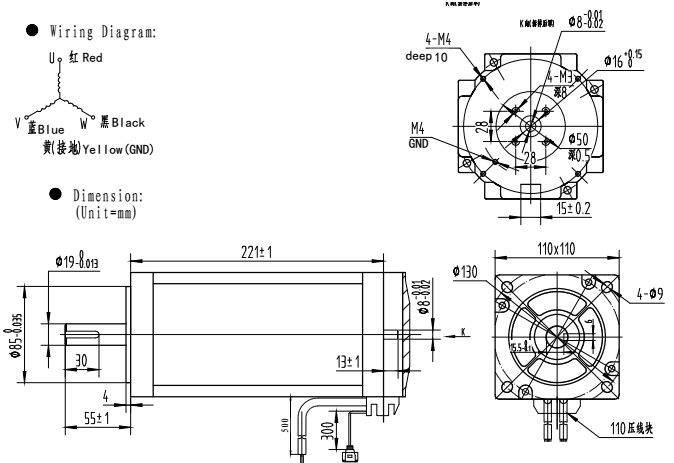
モーター寸法:mm
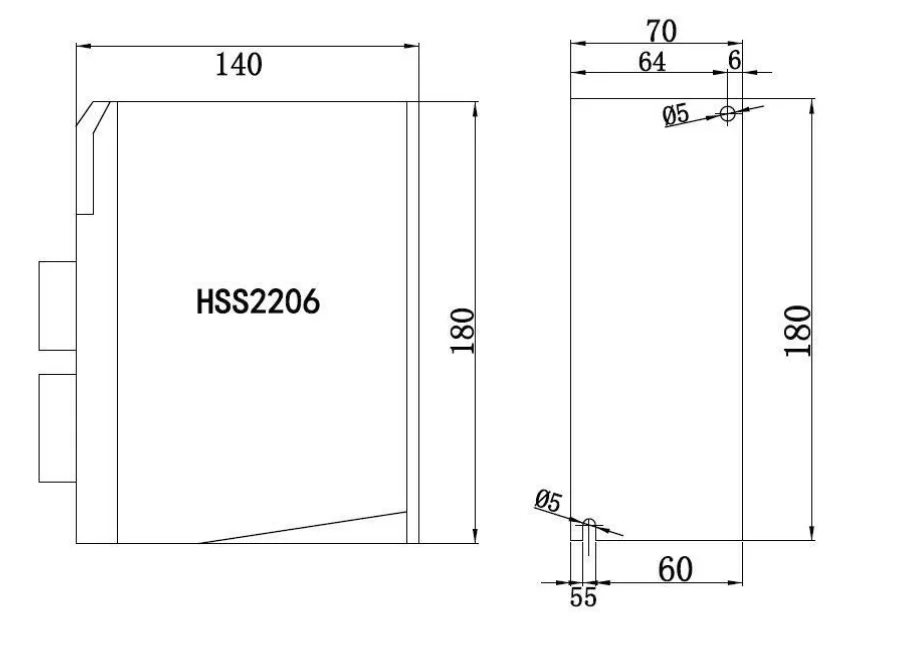
ドライバー 3HSS2260
特徴
1、32 ビット DSP およびベクトル閉ループ制御テクノロジー
2、ステップを失わず、高い位置精度を実現
3、モーターの出力トルクと動作速度を向上させます。
4、可変電流制御技術により、モーターの温度上昇を抑制
5、さまざまな機械的負荷条件に適応します(低剛性プーリーを含む)、いいえ
ゲインパラメータを調整する必要がある
6、スムーズで信頼性の高い動き、低振動、加速と速度の大幅な向上
減速する
7、振動のないゼロ速度静的能力
8、三相 86(NEMA34) および 110(NEMA 42) ハイブリッド サーボ モーターに適応
9、最大ステップパルス周波数200KHZ
10、マイクロステップ 400-60000 パルス/rev
11、電圧範囲AC150-240V
12、過電流、過電圧、過位置保護
13、6 デジタル チューブ ディスプレイ、パラメータを設定し、モーターの動作を監視するのが簡単
州
マイクロステップの選択:
| コード | 意味 | 範囲 | デフォルト値 | 述べる |
| PA0 | バージョンナンバー | 501 | 改変禁止 | |
| PA1 | 制御モードの選択 | 0~2 | 0 | |
| PA2 | モータータイプの選択 | 0~2 | 0 | |
| PA3 | パワーオンディスプレイ | 0~7 | 0 | |
| PA4 | 電流ループ Kp | 0~1000 | 200 | 改変禁止 |
| PA5 | 電流ループ Ki | 0~1000 | 300 | 改変禁止 |
| PA6 | 位置ループ Kp | 0~1000 | 300 | |
| PA7 | マイクロステップ設定 | 400~60000 | 4000 | |
| PA8 | エンコーダ解像度(1000) | 4000 | 改変禁止 | |
| PA9 | エンコーダ解像度(1000) | 40~30000 | 1000 | |
| PA10 | 保持電流 | 10~100 | 40 | |
| PA11 | 閉ループ電流 | 10~100 | 100 | |
| PA12 | 予約 | |||
| PA13 | 予約 | |||
| PA14 | 有効レベル | 0/1 | 0 | |
| PA15 | アラームレベル | 0/1 | 0 | |
| PA16 | パルスモードの選択 | 0/1 | 0 | |
| PA17 | パルスエッジ | 0/1 | 0 | |
| PA18 | モーター回転方向 | 0/1 | 0 | |
| PA19 | ジョグ速度 | 1~200 | 60 | |
| PA20 | PENDモードセクション | 0/1 | 0 | |
| PA21 | 保留レベル | 0/1 | 0 |
ドライバー寸法 (mm):
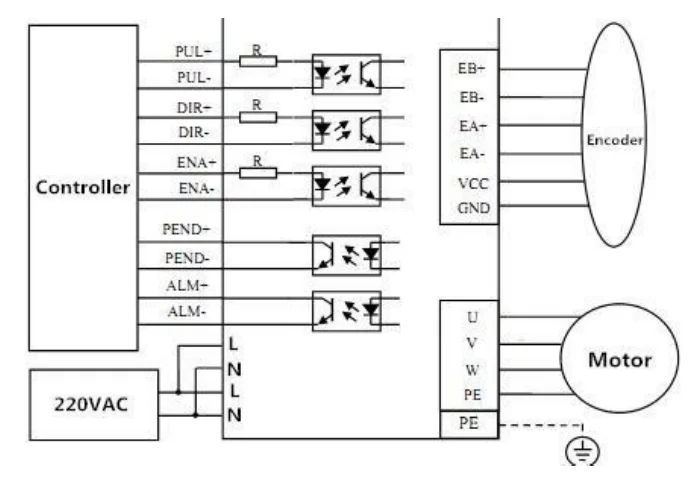
配線図:



,planetary gearbox,worm gearbox,reliable and durable,suitable for all kinds of motors, such as dc motors ,servo motors and stepper motor,to get bigger torque")
ここにメッセージを書いて送信してください
