
このプロジェクトでは、TV または DVD リモコンを使用して DC モーターを正方向または逆方向に動かす方法について説明します。目標は、マイクロコントローラーやプログラミングを使用せずに、変調赤外線 (IR) 38kHz パルス列を使用するシンプルな双方向モーター ドライバーを構築することです。
筆者のプロトタイプを図 1 に示します。

回路と動作
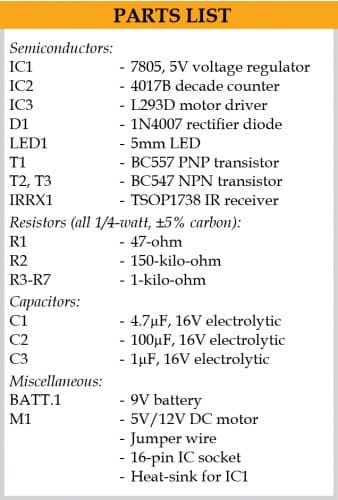
このプロジェクトの回路図を図 2 に示します。これは、IR 受信モジュール TSOP1738 (IRRX1)、10 進カウンタ 4017B (IC2)、モーター ドライバー L293D (IC3)、PNP トランジスタ BC557 (T1)、2 つの BC547 NPN トランジスタ ( T2 および T3)、5V 安定化電源 (IC1)、および 9V バッテリー。
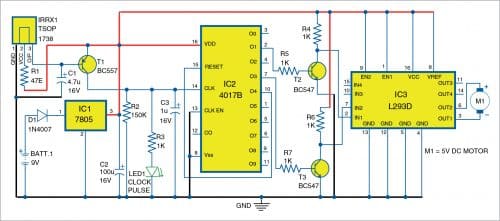
9V バッテリはダイオード D1 を介して電圧レギュレータ 7805 に接続され、プロジェクトに必要な 5V DC を生成します。コンデンサ C2 (100µF、16V) はリップル除去に使用されます。
通常の状態では、IR モジュール IRRX1 の出力ピン 3 はロジック High にあり、これに接続されているトランジスタ T1 がカットオフされ、そのコレクタ端子がロジック Low にあることを意味します。T1 のコレクタは、10 進カウンタ IC2 のクロック パルスを駆動します。
リモコンを IR モジュールに向けて任意のキーを押すと、モジュールはリモコンから 38kHz の IR パルスを受信します。これらのパルスは、T1 のコレクタで反転され、10 進カウンタ IC2 のクロック入力ピン 14 に与えられます。
到着した IR パルスは同じレート (38kHz) で 10 進カウンタをインクリメントしますが、IC2 のクロック入力ピン 14 に RC フィルタ (R2=150k および C3=1µF) が存在するため、パルス列は 1 つのパルスとして現れます。カウンタ。したがって、各キーを押すと、カウンタは 1 カウントだけ進みます。
リモコンのキーが放されると、コンデンサ C3 が抵抗 R2 を介して放電し、クロック ラインがゼロになります。したがって、ユーザーがリモコンのキーを押したり放したりするたびに、カウンターはクロック入力で 1 つのパルスを受信し、パルスが受信されたことを確認するために LED1 が点灯します。
動作中には、次の 5 つの可能性が考えられます。
ケース1
リモコンのキーが押されると、最初のパルスが到着し、10 進カウンタ (IC2) の O0 出力が High になり、ピン O1 ~ O9 が Low になります。これは、トランジスタ T2 と T3 がカットオフ状態であることを意味します。両方のトランジスタのコレクタは 1 キロオームの抵抗 (R4 と R6) によってハイ状態にプルされるため、モーター ドライバー L293D (IC3) の入力端子 IN1 と IN2 は両方ともハイになります。この段階では、モーターはオフ状態です。
ケース2
キーが再度押されると、CLK ラインに到着する 2 番目のパルスによってカウンタが 1 つ増加します。つまり、2 番目のパルスが到着すると、IC2 の O1 出力が High になり、残りの出力は Low になります。したがって、トランジスタ T2 が導通し、T3 は遮断されます。これは、T2 のコレクタの電圧が Low (IC3 の IN1) になり、T3 のコレクタの電圧が High (IC3 の IN2) になり、モータ ドライバ IC3 の入力 IN1 と IN2 がそれぞれ 0 と 1 になることを意味します。この状態では、モーターは正転します。
ケース3
キーがもう一度押されると、CLK ラインに到着する 3 番目のパルスによってカウンタが再び 1 つ増加します。したがって、IC2 の O2 出力は High になります。O2 ピンには何も接続されておらず、出力ピン O1 と O3 は Low なので、トランジスタ T2 と T3 は両方ともカットオフ状態になります。
両方のトランジスタのコレクタ端子は、1 キロオームの抵抗 R4 および R6 によってハイ状態にプルされます。これは、IC3 の入力端子 IN1 および IN2 がハイになることを意味します。この段階で、モーターは再びオフ状態になります。
ケース4
キーがもう一度押されると、CLK ラインに到着する 4 番目のパルスによってカウンタが 4 回目に 1 つ増加します。ここで、IC2 の O3 出力が High になり、残りの出力は Low になるため、トランジスタ T3 が導通します。これは、T2 のコレクタの電圧が高く (IC3 の IN1)、T3 のコレクタの電圧が低くなります (IC3 の IN2) ことを意味します。したがって、IC3 の入力 IN1 と IN2 はそれぞれ 1 と 0 レベルになります。この状態ではモーターが逆回転します。
事例5
キーが 5 回目に押されると、CLK ラインに到着する 5 番目のパルスによってカウンタが再び 1 つ増加します。O4 (IC2 のピン 10) は IC2 のリセット入力ピン 15 に配線されているため、5 回押すと、ディケイド カウンタ IC は O0 が High のパワーオン リセット状態に戻ります。
したがって、この回路は赤外線リモコンで制御される双方向モータードライバーとして動作します。
構築とテスト
この回路は、Veroboard または実際のサイズのレイアウトを図 3 に示す PCB 上に組み立てることができます。PCB のコンポーネントのレイアウトを図 4 に示します。
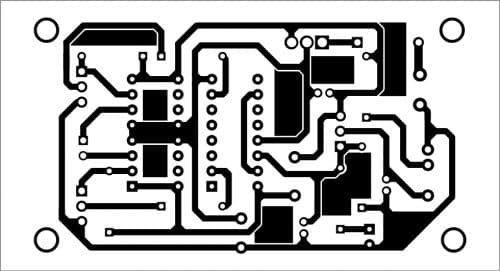
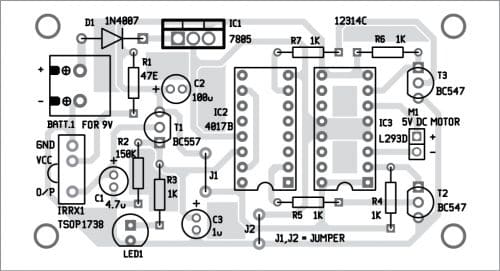
PCB およびコンポーネントのレイアウト PDF をダウンロード:ここをクリック
回路を組み立てたら、BATT.1 間に 9V 電池を接続します。操作については真理値表 (表 1) を参照し、上記のケース 1 からケース 5 で説明されている手順に従ってください。
リサが編集
投稿時間: 2021 年 9 月 29 日